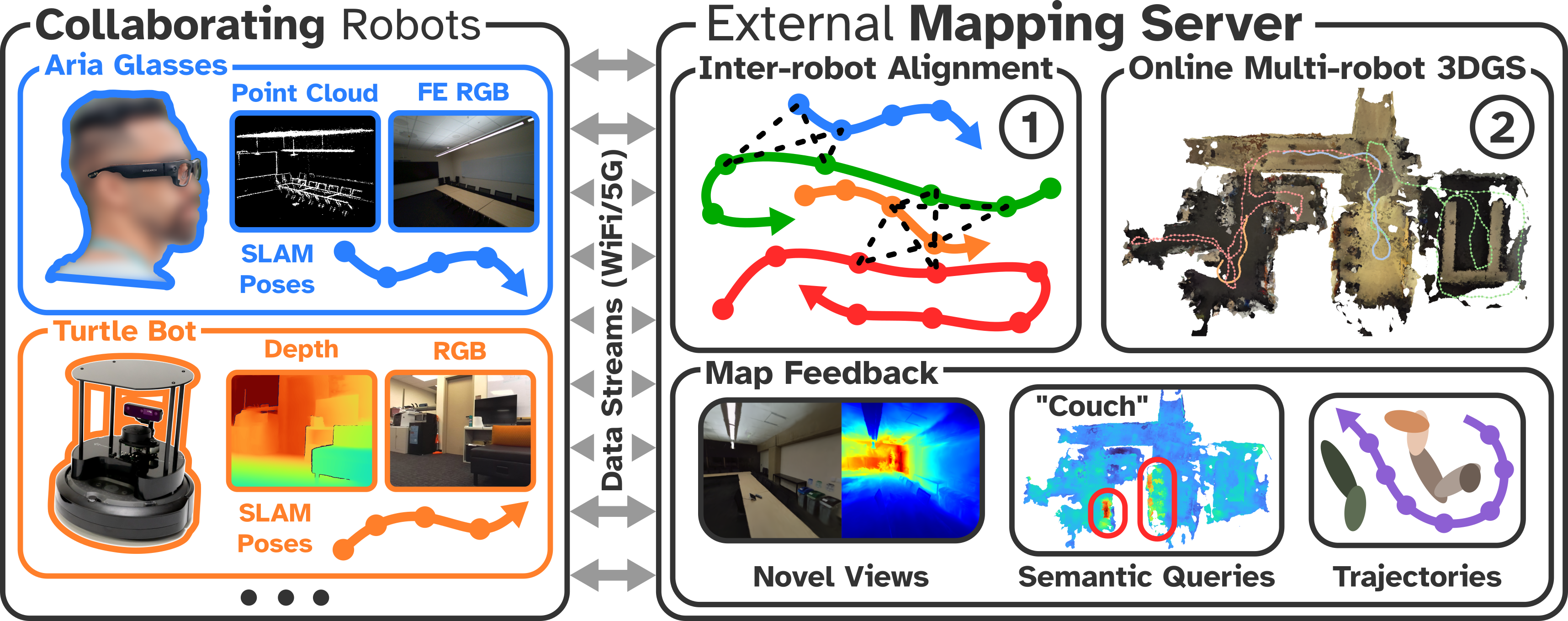
HAMMER is a collaborative 3D Gaussian Splatting (3DGS) framework that enables teams of heterogeneous robots to construct a shared metric-semantic map in real-time. Our maps allow the collaborating robots to develop a comprehensive spatial representation with coverage from the full robot team. HAMMER is designed with flexibility in mind to enable integration with a wide range of robots and sensing devices.